(DRAFT) CS 348B - Computer Graphics: Image Synthesis Techniques
Homework 3 - Camera Simulation
Assigned Thursday, April 20. Due Sunday, May 2.

Updated 4/25
- New versions of existing scene files, linux Makefile, and additional scene
files and textures are available in the class directory. In addition,
binaries of a reference implementation are available for Linux RedHat 9.0 (realistic.so)
and Windows (realistic.dll); a Mac binary will be available shortly as
well. Please update your working version by copying /usr/class/cs348b/files/hw3 (ftp.stanford.edu/class/cs348b).
Make sure to back up your work first!
- Step 3 directions have been added below.
- The FAQ has been updated.
Description
Many rendering systems approximate the light arriving on the film plane by
assuming a pin-hole camera, which produces images where everything that is
visible is sharp. In contrast, real cameras contain multi-lens assemblies
with different imaging characteristics such as limited depth of field, field
distortion, vignetting and spatially varying exposure. In this assignment,
you'll extend pbrt with support for a more realistic camera model that
accurately simulates these effects.
Specifically, we will provide
you with data about real wide-angle, normal and telephoto lenses, each composed
of multiple lens elements. You will build a camera plugin for pbrt that
simulates the traversal of light through these lens assemblies.
With
this camera simulator, you'll explore the effects of focus,
aperture and exposure. You will empirically characterize the critical points of
the telephoto and normal lenses. Using these data you can optimize
the performance of your simulator considerably.
Step 0
You must have pbrt installed correctly, as in homework 1.
In addition, you should add . (the local directory) to your PBRT_SEARCHPATH.
Step 1
Re-read A Realistic
Camera Model for Computer Graphics by Kolb, Mitchell, and Hanrahan.
Step
2: Compound Lens Simulator
- Copy /usr/class/cs348b/files/hw3 to a directory at the same level as your
local pbrtsrc directory. Alternatively,
you can use anonymous ftp to get the files (ftp.stanford.edu/class/cs348b).
This directory consists of:
- A Makefile for Linux, and a Visual Studio 2003 project for Windows.
- A stub C++ file, realistic.cpp, for the code you will write.
- Seven scene files, which end in .pbrt (the same as the .lrt files that
have been used in previous assignments).
- Four lens files, which end in .dat.
- Binaries for a reference implementation of realistic.cpp (Linux RedHat
9.0 realistic.so; Windows realistic.dll; OSX implementation coming
soon).
- Various textures used by the scene files.
- Modify the stub file, realistic.cpp, to trace rays from the film plane
through the lens system supplied in the .dat files. The following is a
suggested course of action, but feel free to proceed in the way that seems
most logical to you:
- Build an appropriate datastructure to store the lens parameters
supplied in the
tab-delimited input .dat files. The format of the tables in these file is given in Figure 1of the Kolb
paper.
- Develop code to trace rays through this stack of lenses. Updated (4/22):
Please use a full lens simulation rather than the thick lens
approximation in the paper. It's easier (you don't have to
calculate the thick lens parameters) and sufficiently efficient for this
assignment.
- Write the RealisticCamera::GenerateRay function to trace randomly
sampled rays through the lens system. For this part of the
assignment, it will be easiest to just fire rays at the back element of
the lens. Some of these rays will hit the aperture stop and
terminate before they exit the front of the lens.
- Render images using commands such as 'pbrt dof-dragon.dgauss.pbrt'.
Decrease the noise (and increase the rendering time) by changing the
"integer pixelsamples" parameter in the scene files.
- Updated (4/25): You may compare your output against the
reference implementation, (realistic.so on Linux RedHat 9.0 and
realistic.dll on Windows; Mac implementation will be available shortly).
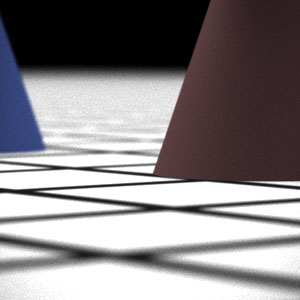
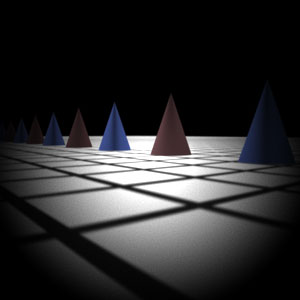
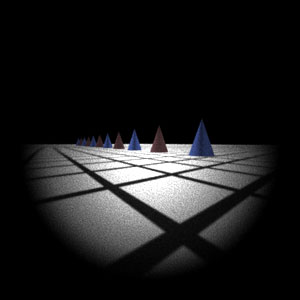
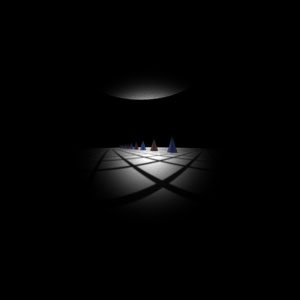
Sample Images:


- From left to right: telephoto, normal, wide angle and fisheye.
- Note that these were produced with 512 pixel samples rather than the
default 32.
- Notice that the wide angle image is especially noisy -- why is that?
Hint: look at the ray traces at the top of this web page.
Some conventions:
- Assume that the origin of the camera system is at the left-most element of
the stack (the point closest to the world).
- Assume that the 'filmdistance' parameter passed to the RealisticCamera
constructor is measured from the right-most element of the stack (the point
closest to the film).
- There is exactly one aperture stop per lens data file. This is the
entry with a radius of 0. Note that the diameter of this entry is the
maximum aperture of the lens. The actual aperture diameter to use is
passed in the scene file, and appears as a parameter to the RealisticCamera
constructor.
- In this assignment, everything is measured in millimeters.
Hints:
- ConcentricSampleDisk() is a useful function for converting two 1D uniform
random samples into a uniform random sample on a disk. See p. 270 of
the PBRT book.
- It may be helpful to decompose the lens stack into individual lens
interfaces and the aperture stop. For the lens interfaces, you'll need
to decide how to test whether rays intersect them, and how they refract
according to the change of index of refraction on either side (review
Snell's law).
- For rays that terminate at the aperture stop, return a dead ray (one where
mint > maxt, for instance) from the GenerateRay function.
- Be careful to weight the rays appropriately (this is represented by the
value returned from GenerateRay). You should derive the
weight from the integral equation governing irradiance incident on the film plane
(hint: in the simplest form, this equation contains a cosine term raised to the fourth
power). The exact weight will depend on the sampling scheme
that you use to estimate this integral. Make sure that your estimator
is unbiased if you use importance sampling! The paper also contains
details on this radiometric calculation.
- As is often the case in rendering, your code won't produce correct images
until everything is working just right. Try to think of ways that you
can modularize your work and test as much of it as possible incrementally as
you go. Use assertions liberally to try to verify that your code is
doing what you think it should at each step. Another suggestion would be to
produce a visualization of the rays refracting through your lens system as a
debugging aid (compare to those at the top of this web page).
Step 3: Exploring the way a camera works with your simulator
In this section you'll explore how various choices affect focus, depth of
field and exposure in your camera.
- The double gauss and telephoto lenses can be well approximated as a thick
lens. Your first task is to determine the critical points of these
lenses to characterize its thick lens approximation. Rather than
tracing single rays, as described in the paper, however, you will take
certain special pictures to do so. This will let you develop a better
intuition for the
way focus works in a camera. It's also the way you would characterize a camera
lens in the real world! The procedure is as follows:
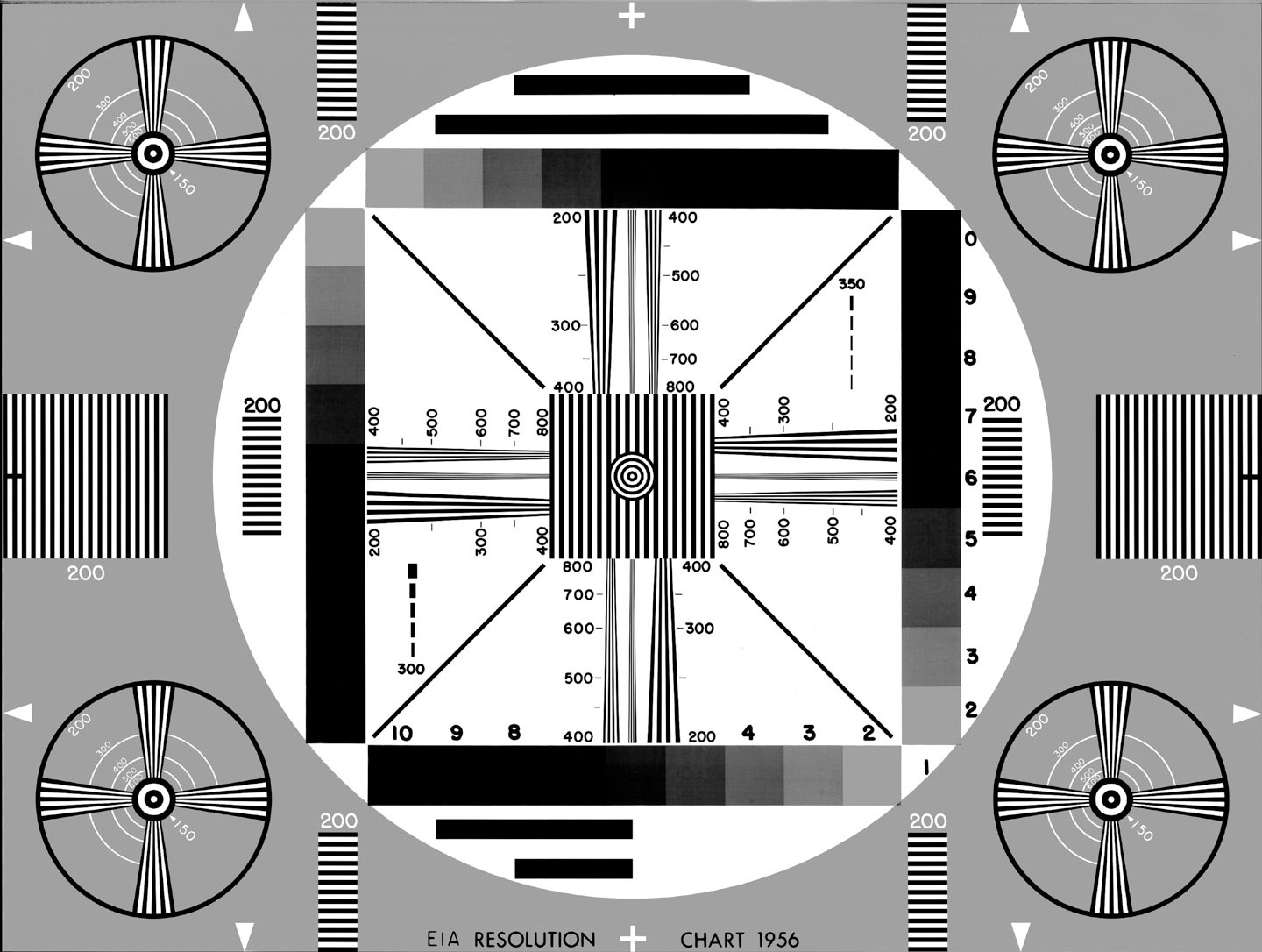
- Take a picture that tells you the film-side focal point. The
basic idea is to take a picture of an object at infinity and find the
film plane distance that makes it sharp. The film plane's depth is
equal to the focal point. (Why is this?) We have provided
you with a scene file, infinity-test.pbrt, that will get you
started. This file renders an image of the focus target below at a
distance of 10m. You just have to choose and modify the film plane
that creates a sharp picture. Remember that the "filmdistance"
parameter specifies the depth of the film from the back (not the front!)
of the lens (see the conventions described in Step 2).

- Take a second picture with a film depth that gives roughly unit
magnification, and that shows you what the depth of the conjugate world
focus plane is. A very tedious way of doing this would be to
modify infinity-test.pbrt to put the target closer to the lens,
and find the film plane that makes it sharp; then modify the depth of
the target and film planes iteratively until you find unit
magnification. A better way is to use a depth
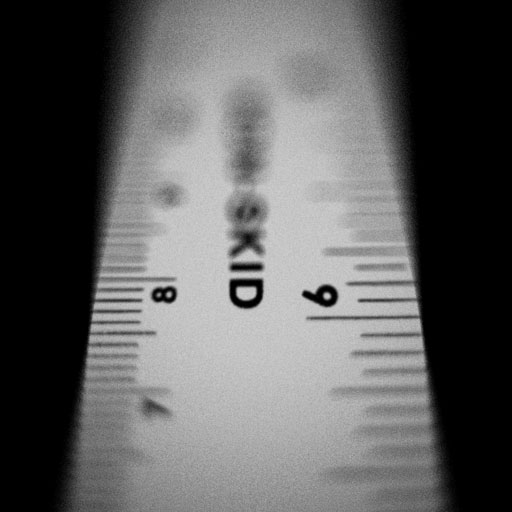
of field target, as you would in the real world. The idea here
is to fix a film plane, and take a picture of a ruler on a 45 degree
angle. If the ruler intersects the plane of focus, then the
sharpest point on the image of the ruler lets you deduce the depth of
the conjugate plane. We have created a file, dof_target.pbrt,
and a test scene, dof-test.pbrt, that includes this object.
The scene is set up so that when you take a picture of the ruler the
point of sharpest focus lets you read off the distance of the focal
point from the front of the lens. For example, the following image
shows that the focal point is between 70 and 80 mm of the front of the
ruler. The texture for the ruler is shown on the right.

Note that you may still have to move the target and/or the camera so
that a sharp point is within the camera's field of view. You will
also have to find the film depth that gives approximately unit
magnification.
- From the procedures above you have measured or can calculate values
for all the variables in the following diagram of the thick lens
configuration:
D_X is the depth coordinate (measured) for the focal plane in the depth
of field test. D_F is the coordinate of the world-space focal
point. D_P and D_P' are the coordinates of the principal
planes. Note that depending on the lens, D_P' may actually be to
the left of D_P, contrary to what's shown in this diagram. D_F' is
the location of the image-space focal point and D_X' is the depth
coordinate of the film. By convention these coordinates are all
relative to the front element of the lens, which is not
shown. Note that the focal depth, F, is the same on both sides. Hint:
W and W' are simple functions of the focal depth, F, and the
magnification M. You measure M from the image
you generate from the depth of field test. This fact will be
needed when you solve for the values of the unknown variables.
- Compute the thick lens parameters for the normal and telephoto lenses.
How do they differ?
We will ask you to report values for these in your write-up.
You may like to discuss strategies to find the correct film plane
quickly, etc., but please don't discuss the actual values you compute
with other students.
- Investigate depth of field. Use the telephoto lens for this
test.
- Set up the camera so that it frames the depth of field target and is
focused at 1 meter. Now take two pictures, one with the aperture
set at the maximum radius, and another with it stopped down to 1/2 its
radius. How does the depth of field change?
- Now take two pictures with the aperture wide open. One should be
focused at 1 meter and the other at 2 meters. How does the depth
of field change?
- Investigate exposure. Take two pictures with the aperture full open
and half open. How does the exposure change? Does your ray
tracer output the correct exposure? Why or why not?
Step 4: Web page submission
- You will report your findings in a web page again. To hopefully make the write-up a bit easier, and
to make the formatting more
consistent, we have created a web page template where you can just fill in the
blanks.
- Copy the /usr/class/cs348b/files/hw3/submission directory to your
web-visible directory, and edit
index.html. The items that you have to replace are marked in green.
- Note: please do not include your source code on the web page
this time, or link to it. You will email it to us (see below).
- Though it is not a requirement, feel free to append a discussion of
anything extra or novel that you did at the end of your web page.
- Please send an email to cs348b-spr0304-staff@lists.stanford.edu
- Make the subject 'HW3 submission'. (Please don't send this email till
your web page is completely done, and please don't submit any other
emails with that subject title if you can help it. This helps us
keep everything in order.)
- In the body of your email, please include the URL
for your web page as the first line.
- Please attach to your email your source code, realistic.cpp, and your
final scene files for Step 3.
That's it!
FAQ
Please check this FAQ before sending questions to the staff email list.
We will update this list as common issues arise.
- Q: PBRT complains that it can't find realistic.dll or realistic.so.
What should I do?
A: Make sure that '.' (the local directory) is in your PBRT_SEARCHPATH
environment variable. In this assignment, you will compile a camera
plugin (realistic.so/dll) in your working directory. Note that the
path is ':' delimited on Linux and ';' delimited on Windows.
- Q: Should we be implementing the thick lens approximation described in the
paper or a full lens simulation?
A: Please implement the full lens simulation, which is less work for you and
only slightly less efficient computationally. Implementing the thick
lens approximation is a superset of the work, since you need the full lens
simulation in order to calculate the thick lens parameters.
- Q: Why are my images so noisy?
A: Integrating over the surface of the lens, especially for large apertures,
requires multiple samples for accuracy. Too few samples increases the
variance of the integral estimate, resulting in noisy images. The
problem is exacerbated in Step 2 by the fact that you will fire many rays at
the lens system that will not make it into the world because they will hit
the aperture stop. To drive down the noise, you can increase the
number of samples ("integer pixelsamples" parameter in the scene
file). In Step 4 of the system you will also explore optimizing the
sampling of the lens system by trying to fire only rays that will actually
make it through the lens. This will reduce the noise of your estimation and
help your approximation converge more quickly. If you formulate this
as a form of importance sampling, it will only reduce noise in your estimate
without introducing bias.
- Q: It takes a long time to render just one picture. It's going to
take forever to find the focal point using infinity-test.pbrt!
A: First, a hint: the focal point is between 60 and 70 mm for the
double gauss lens, and between 200 and 220 mm for the telephoto
lens.
The next consideration is to speed up your individual renders as much as
possible. Try rendering just the center portion of the film (the
bullseye target) and reducing the number of pixel samples. Finally,
try batch-rendering a series of images at different film depths within the
suggested range and iterating about the closest pair. These skills in
creating useful quick renders and batch jobs will hold you in good stead on
the final project.
Finally, if you want a more satisfying solution, you could create a modified
version of your camera plugin. This is by no means required for the
assignment. The idea would be to simulate a tilted film plane.
By rendering a single image with such a camera, you can read off the focal
depth by correlating the position of sharpest image focus with the
corresponding film depth. Such a tilted plane is available in
large-format view cameras, such as the one used by Ansel Adams. It is
practically useful in that you can create pictures where arbitrary planes
are in sharp focus -- not just planes that are perpendicular to the axis of
the lens as in traditional 35 mm cameras. For instance, you can take a
picture facing the horizon where everything on the ground plane is in
focus.
- Q: How can the value that you read off the depth of field target ruler be
equal to the depth? It's on a 45 degree angle!
A: Take a look at dof_target.pbrt. The ruler is scaled by
sqrt(2), to allow you to read off the depth in this convenient way.
- Q: What does it mean to "take a picture with a film depth that gives
roughly unit magnification"?
A: Magnification varies with the film depth, as shown in the diagram
above. A magnification of M means that lines 1 mm apart on the
world-space focal plane appear as M mm on the film plane. You should
measure the magnification on the images that you render. To do so, you
need to know the mm size of the film (defined as the "filmdiag"
parameter in the scene file), and it is useful to know that the width of the
ruler is 31.617 mm (see dof_target.pbrt).
Miscellaneous Data
You can replace the cones in the rendered scenes with the dragons shown in
Figures 6.6-6.9 in the PBRT book. Just download the dragon.pbrt scene from
/usr/class/cs348b/files/geometry, and then comment out the appropriate lines in
the hw3 directory scenes. Be warned that this requires a fair amount of
memory to render.
Grading
** The assignment passes all or almost all our tests.
* Substantial work was put in, but the assignment didn't pass all
our tests.
0 Little or no work was done on the assignment.
*** Extra credit may be given on a case-by-case basis for well done
extensions (for any part of the project) that produce superior results.
Copyright © 2004 Pat Hanrahan