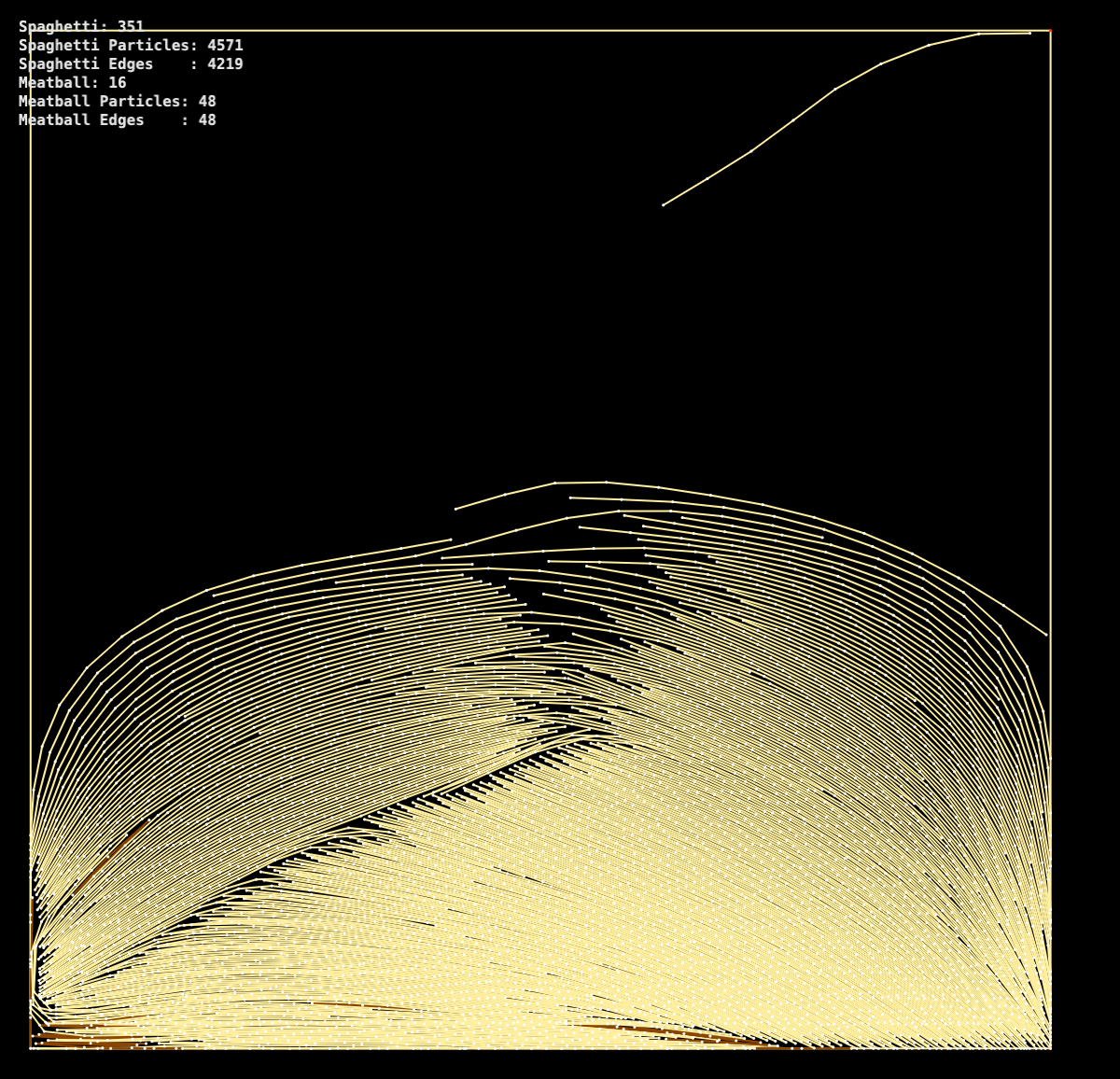
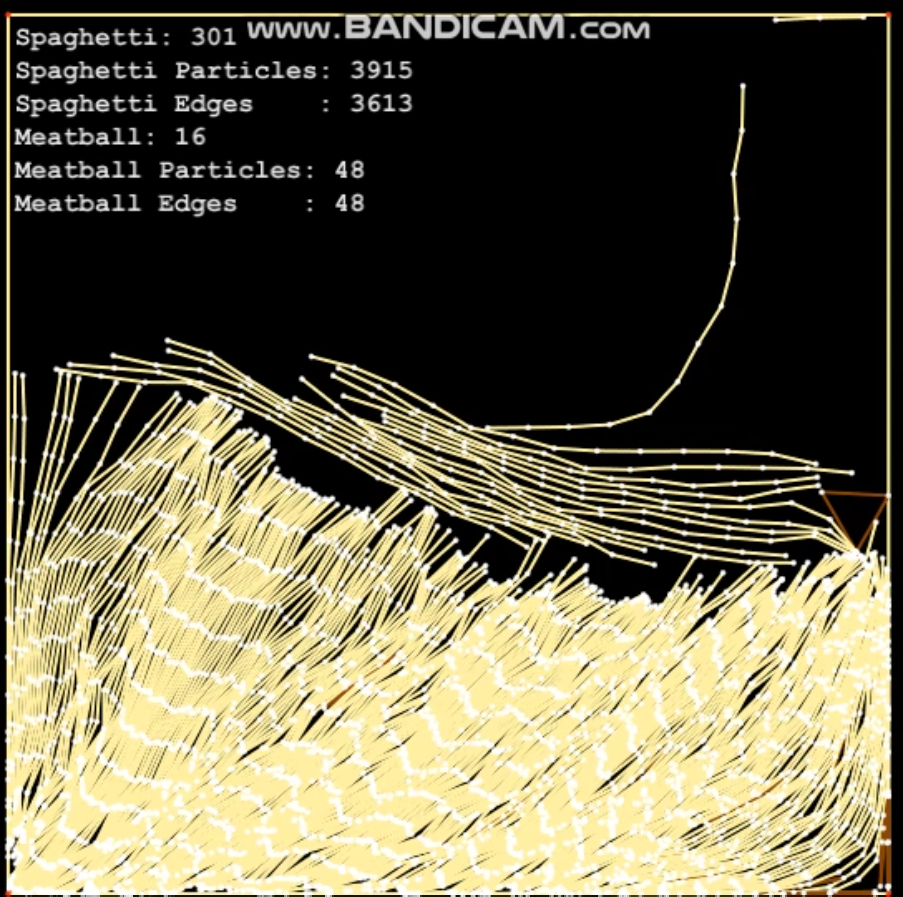
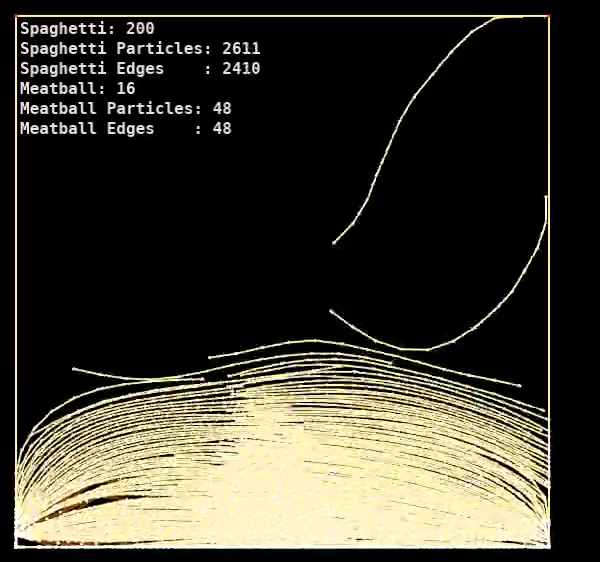
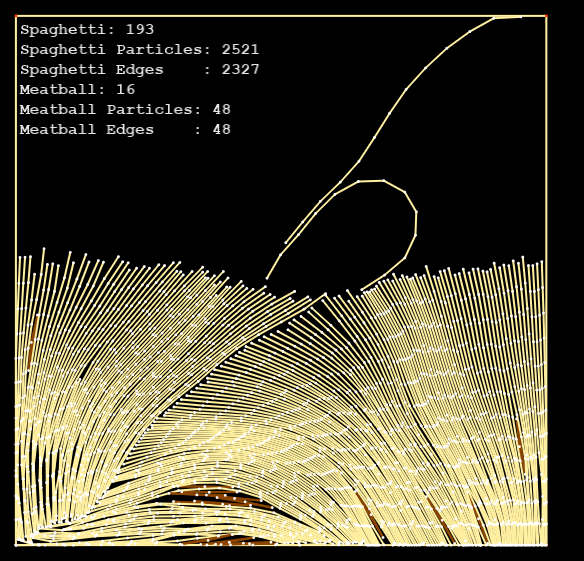
Robust Collision Processing
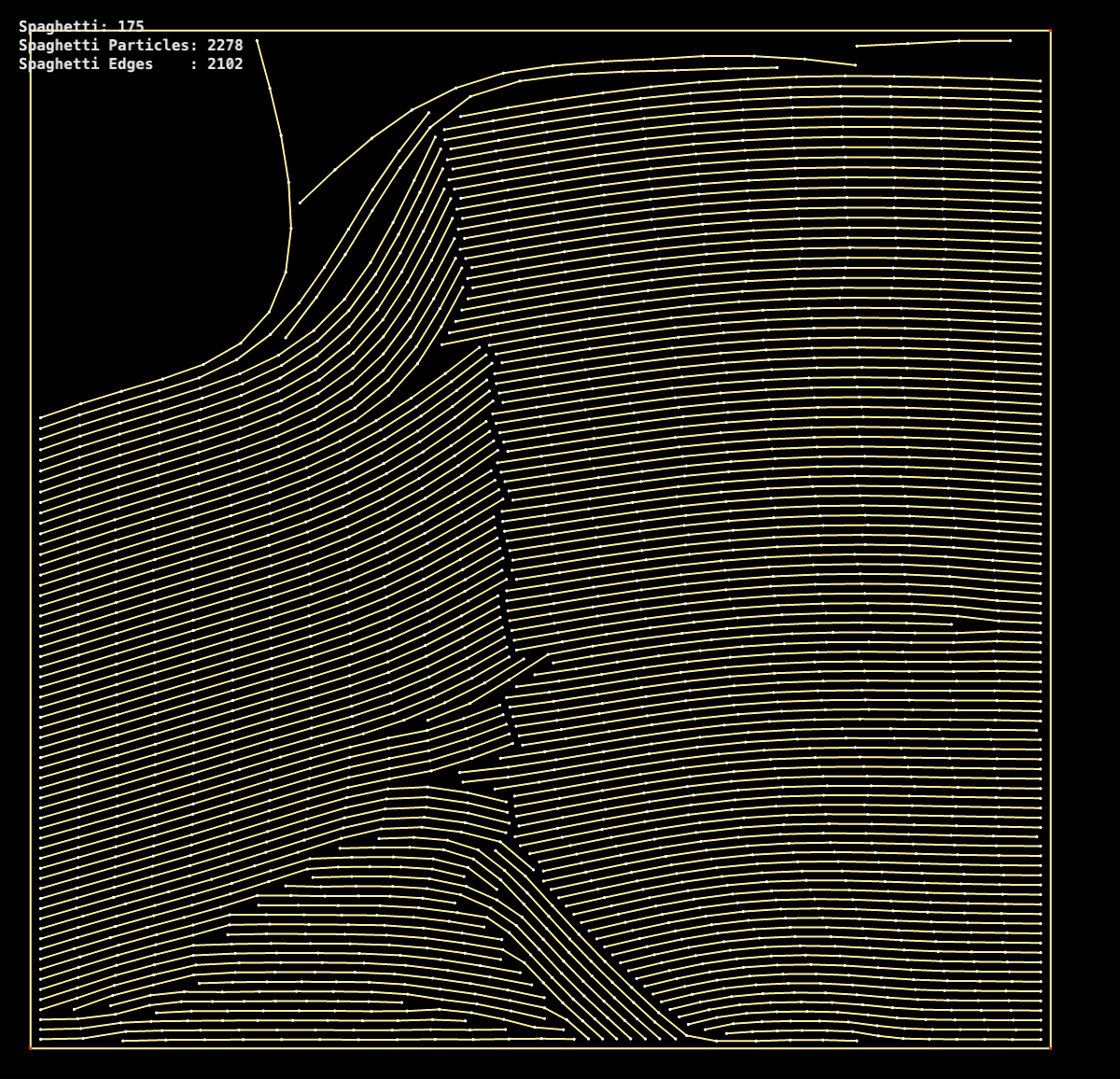
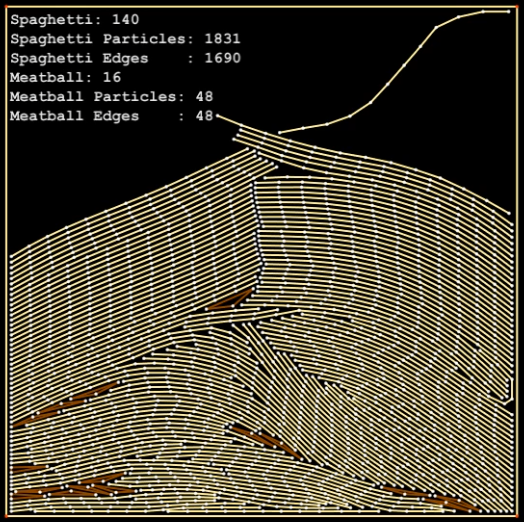
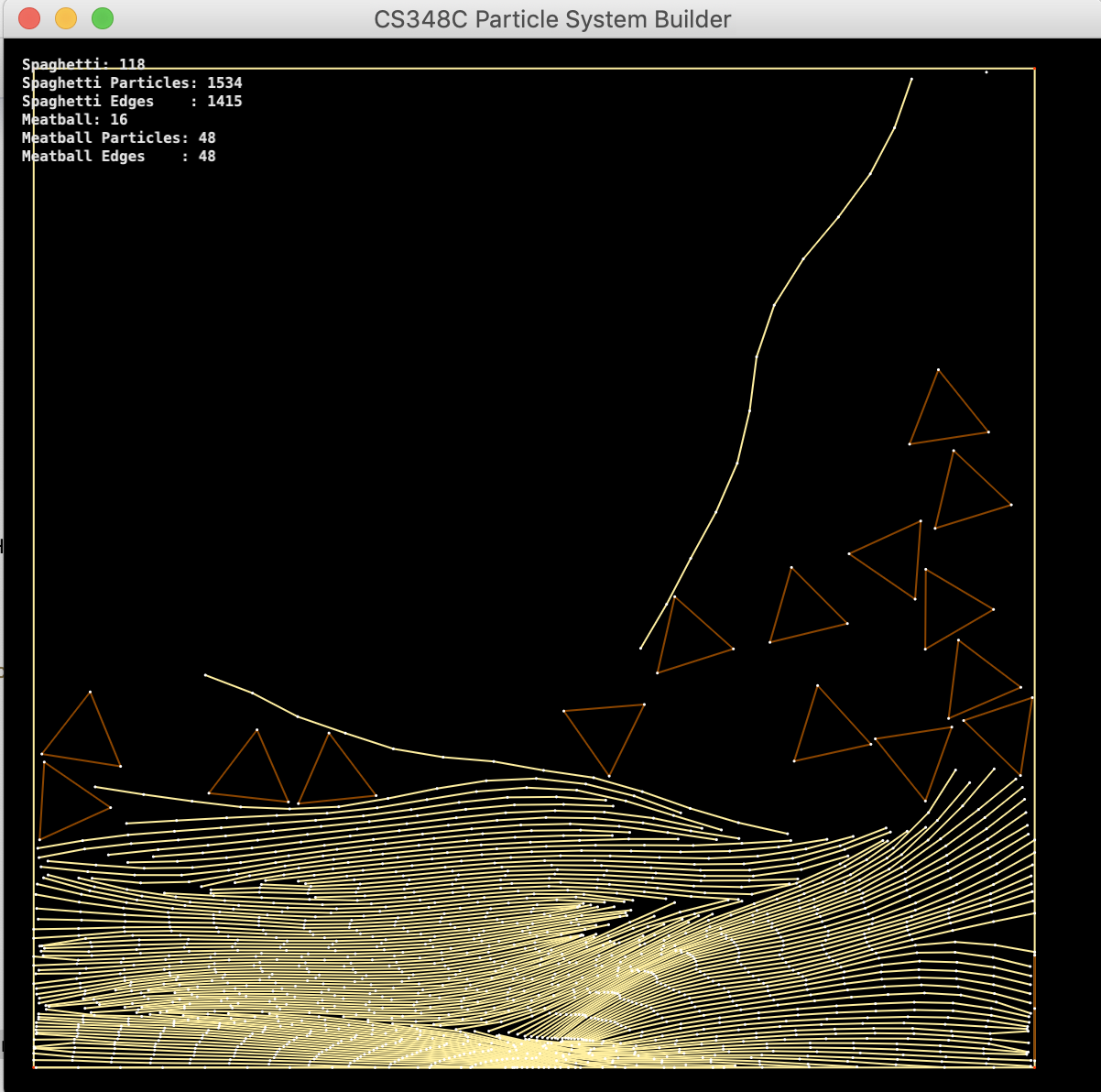
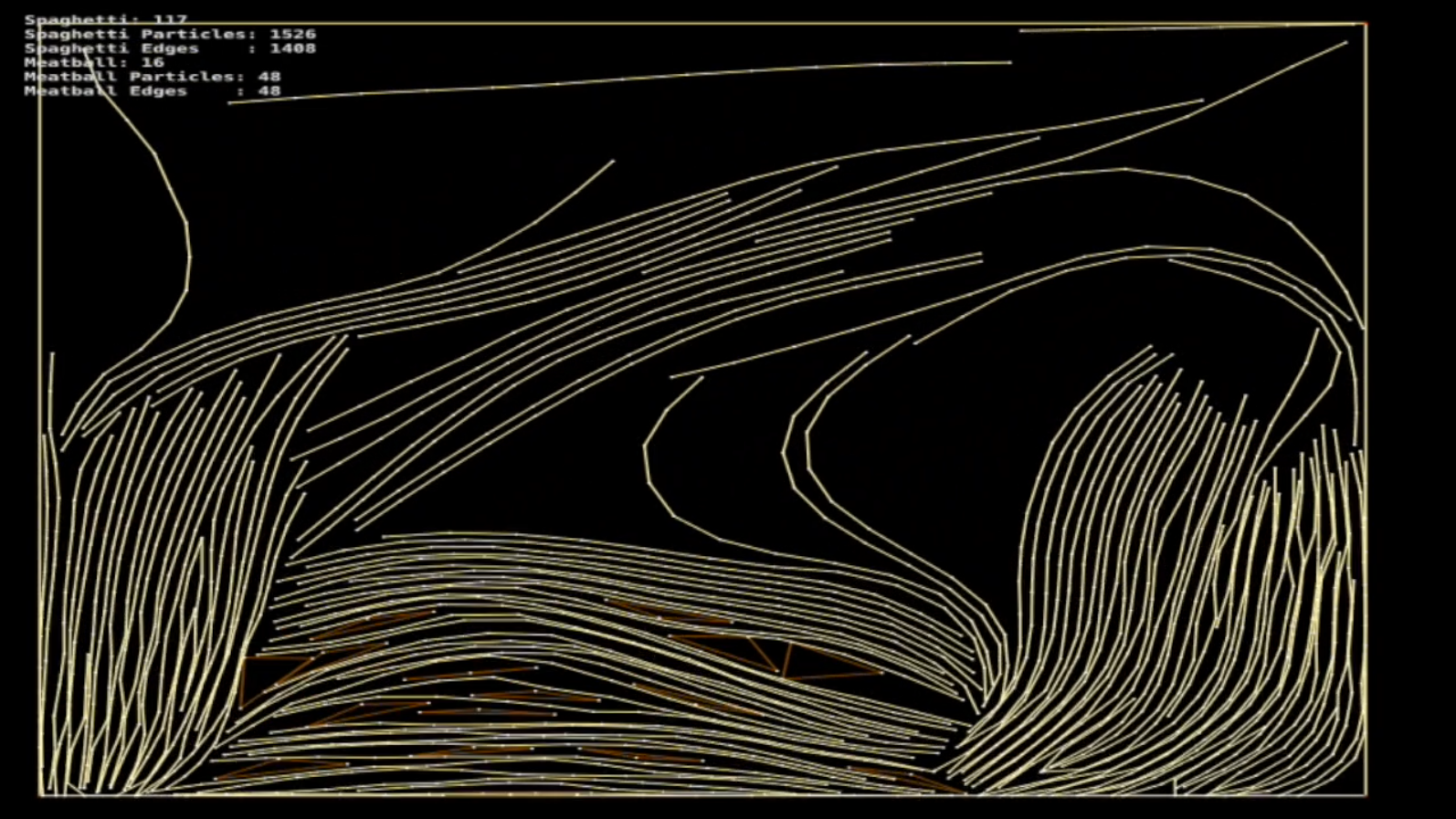
(a.k.a. "The Spaghetti Factory")
Professor: Doug James
Due date: Wed Feb 6, 2019.
In this assignment you will gain experience with robust collision detection and contact resolution for thin objects by implementing a simulator similar to the cloth system in [Bridson et al. 2002]. However, since you (and any partner) only have a couple weeks to complete your system, you will implement only a 2D version. In addition to creative artifacts, we challenge you to see "how high you can stack it" at the Spaghetti Factory before edge-edge interpenetrations occur.
Groups: Work on your own, or in a group of at most two people.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}