Presented at the
IEEE Conference on Computer Vision and Pattern Recognition 2001
CVPR 2001 Best Student Paper Award
Abstract
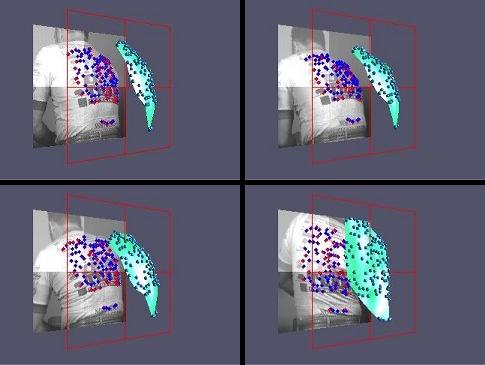
This paper presents a novel solution for flow-based tracking and 3D reconstruction of deforming objects in monocular image sequences. A non-rigid 3D object undergoing rotation and deformation can be effectively approximated using a linear combination of 3D basis shapes. This puts a bound on the rank of the tracking matrix. The rank constraint is used to achieve robust and precise low-level optical flow estimation without prior knowledge of the 3D shape of the object. The bound on the rank is also exploited to handle occlusion at the tracking level leading to the possibility of recovering the complete trajectories of occluded/disoccluded points. Following the same low-rank principle, the resulting flow matrix can be factored to get the 3D pose, configuration coefficients, and 3D basis shapes. The flow matrix is factored in an iterative manner, looping between solving for pose, configuration, and basis shapes. The flow-based tracking is applied to several video sequences and provides the input to the 3D non-rigid reconstruction task. Additional results on synthetic data and comparisons to ground truth complete the experiments.