3DLite: Towards Commodity 3D Scanning for Content Creation
Stanford University
2Technical University of Munich

ACM Transactions on Graphics 2017
Abstract
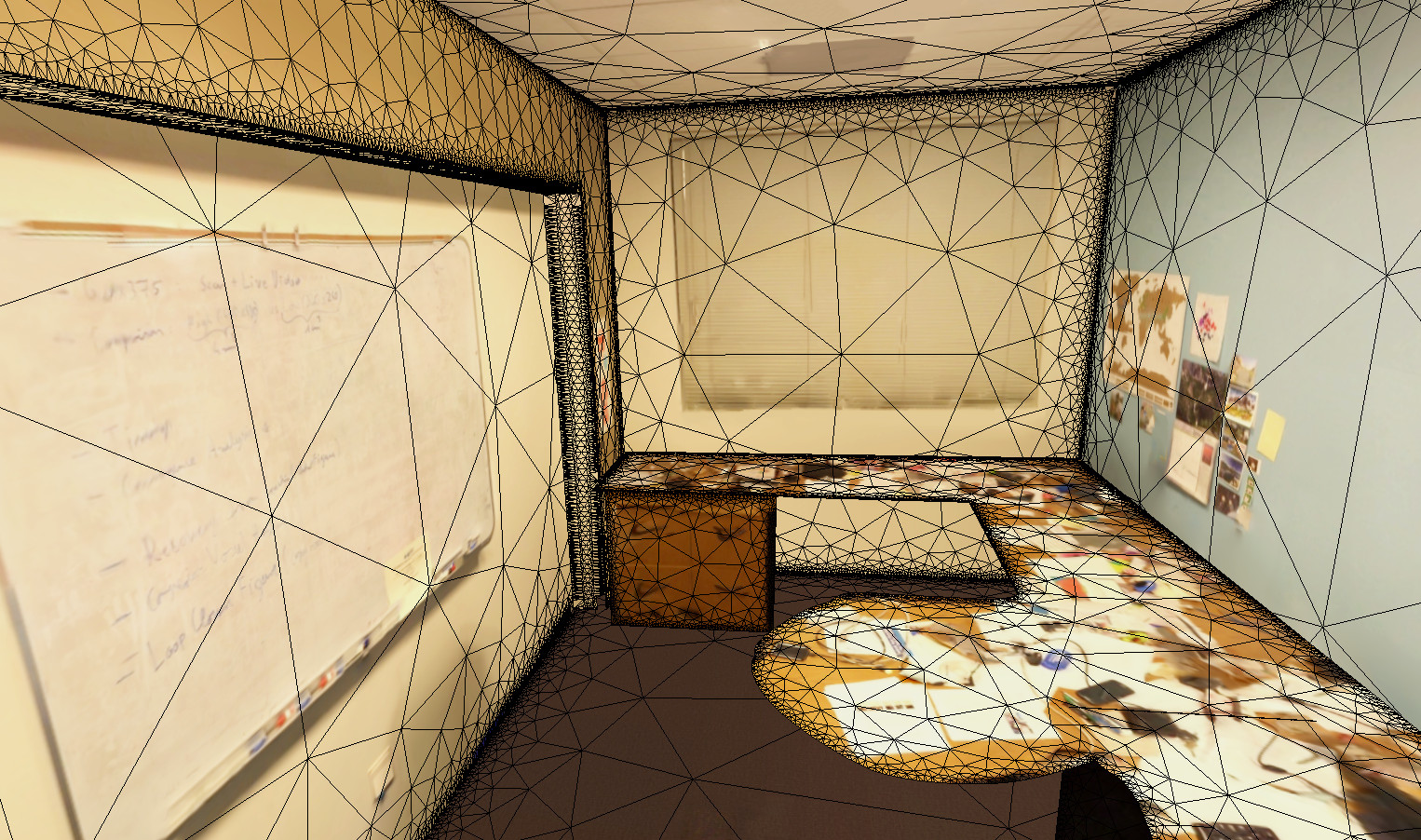
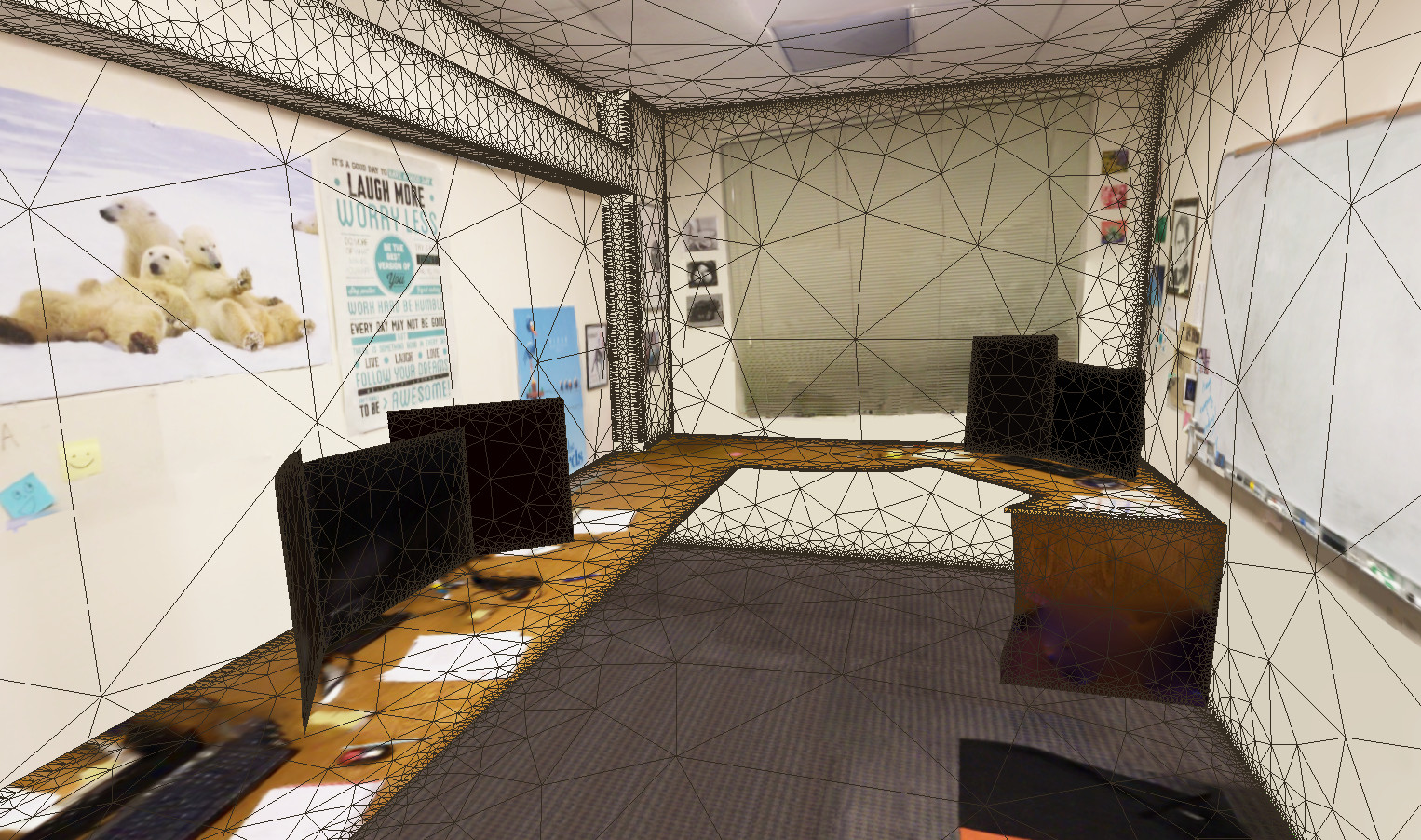
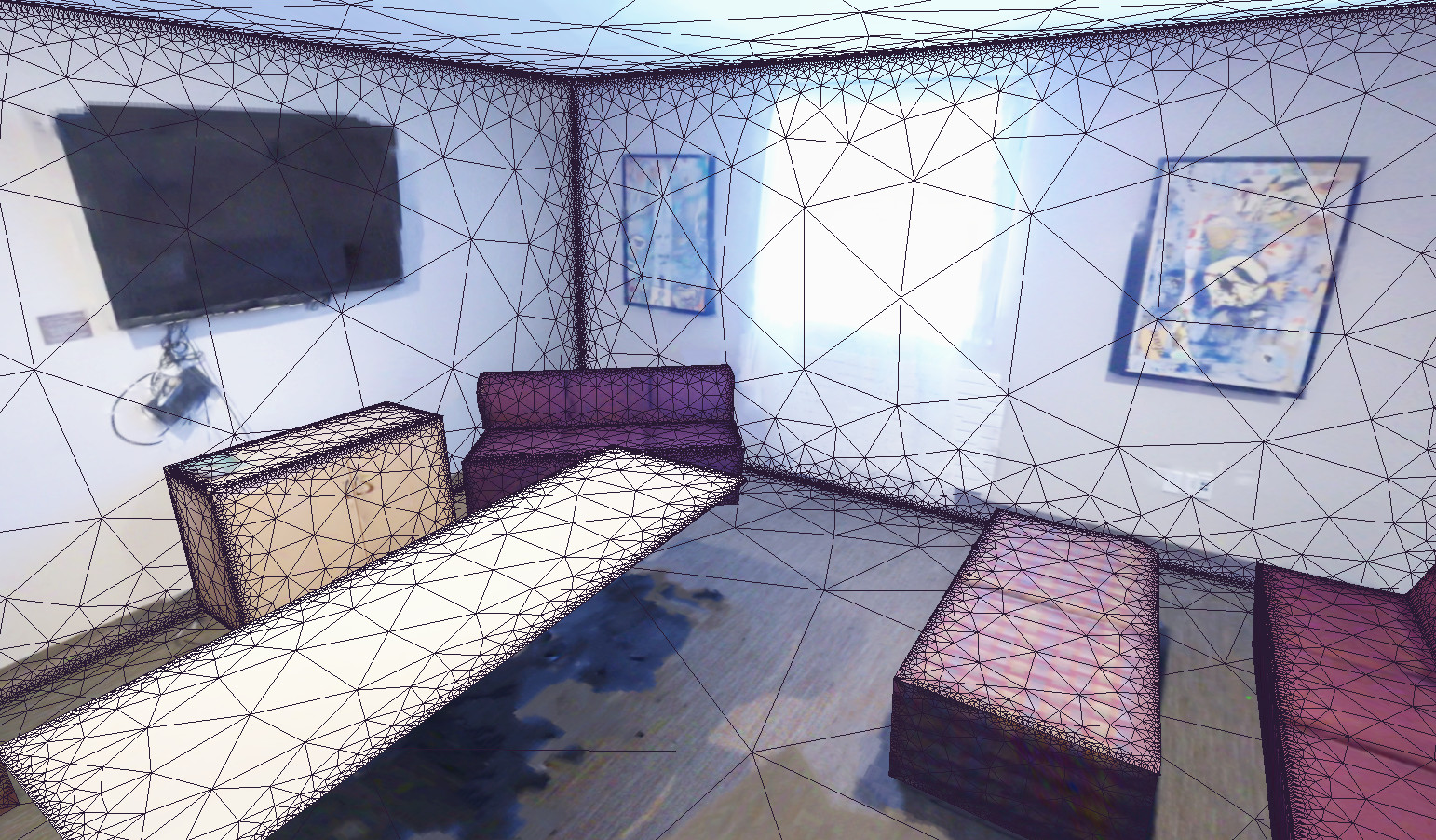
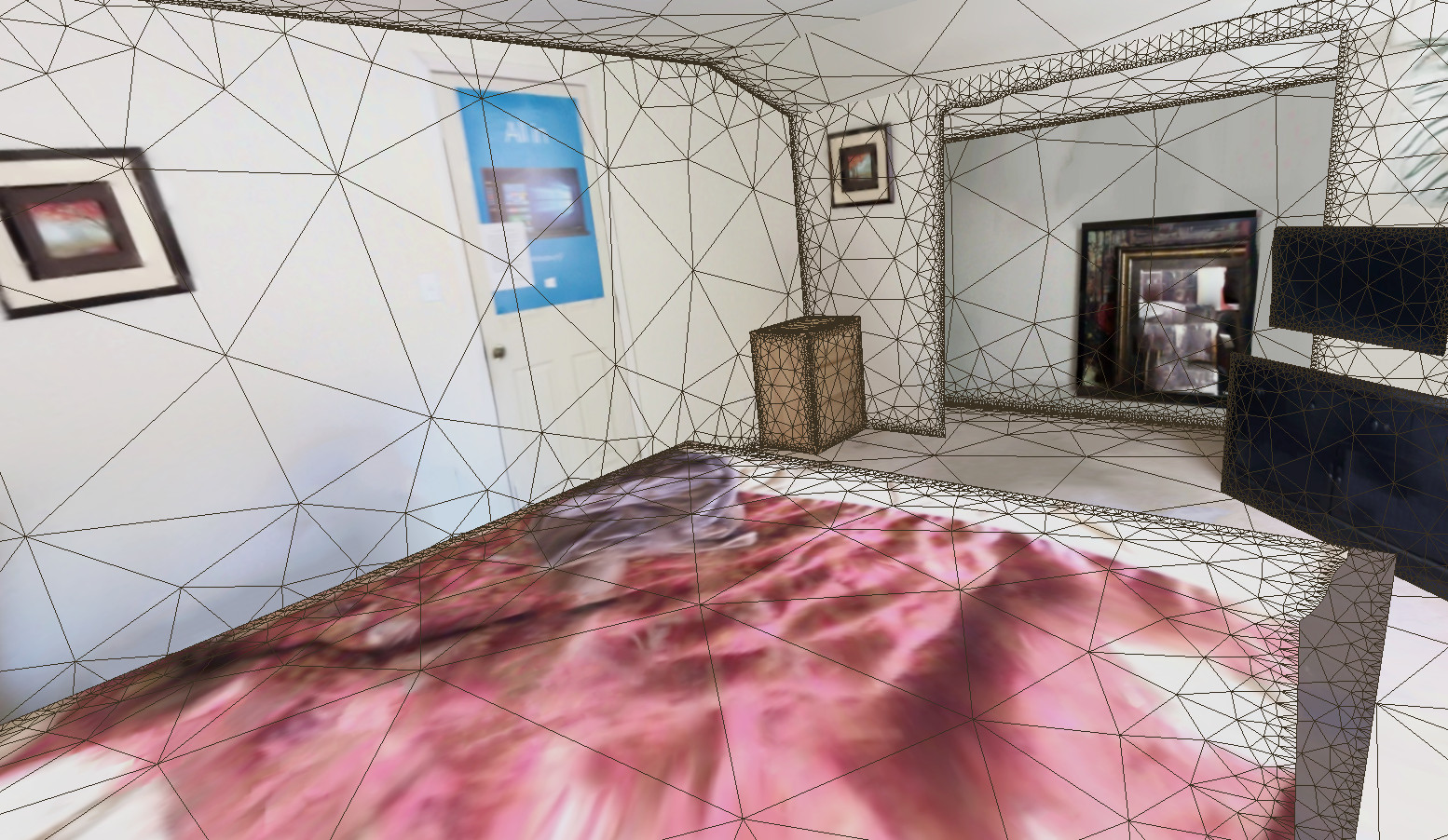
We present 3DLite, a novel approach to reconstruct 3D environments using consumer RGB-D sensors, making a step towards directly utilizing captured 3D content in graphics applications, such as video games, VR, or AR. Rather than reconstructing an accurate one-to-one representation of the real world, our method computes a lightweight, low-polygonal geometric abstraction of the scanned geometry. We argue that for many graphics applications it is much more important to obtain high-quality surface textures rather than highly-detailed geometry. To this end, we compensate for motion blur, auto-exposure artifacts, and micro-misalignments in camera poses by warping and stitching image fragments from low-quality RGB input data to achieve high-resolution, sharp surface textures. In addition to the observed regions of a scene, we extrapolate the scene geometry, as well as the mapped surface textures, to obtain a complete 3D model of the environment. We show that a simple planar abstraction of the scene geometry is ideally suited for this completion task, enabling 3DLite to produce complete, lightweight, and visually compelling 3D scene models. We believe that these CAD-like reconstructions are an important step towards leveraging RGB-D scanning in actual content creation pipelines.
Paper HQ | Paper LQ | Supplemental | Dataset | BibTeX citation | Source Code (Coming Soon)
We provide 3DLite models for BundleFusion Scenes office0, office1, office3, as well as ScanNet sequences 0567_01, 0451_05, 0294_02, 0271_01, 0220_02. We also provide 3DLite models and rgb-d data for two additional sequences captured by a Structure.io depth sensor coupled with an iPad color camera. Please refer to the respective publication when using this data.
Format
3DLite models are provided as zippedRgb-d sequences each contain:
- Color frames (
frame-XXXXXX.color.jpg): RGB, 24-bit, JPG - Depth frames (
frame-XXXXXX.depth.png): depth (mm), 16-bit, PNG (invalid depth is set to 0) - Camera poses (
frame-XXXXXX.pose.txt): camera-to-world (invalid transforms-INF) - Camera calibration (
info.txt): color and depth camera intrinsics and extrinsics.
.sens format, please see the c++ reader for how to load the file.
License
The data has been released under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 License.
BundleFusion office3 |
office3-3dlite.zip |
 |
|
BundleFusion office1 |
office1-3dlite.zip |
 |
|
BundleFusion office0 |
office0-3dlite.zip |
 |
|
ScanNet scene0567_01 |
scene0567_01-3dlite.zip |
 |
|
ScanNet scene0451_05 |
scene0451_05-3dlite.zip |
 |
|
ScanNet scene0294_02 |
scene0294_02-3dlite.zip |
 |
|
ScanNet scene0271_01 |
scene0271_01-3dlite.zip |
 |
|
ScanNet scene0220_02 |
scene0220_02-3dlite.zip |
 |
|
apt |
640x480 color640x480 depth |
apt-3dlite.zipapt-initial.plyapt-rgbd.zip (745MB)apt.sens (1.3GB) |
 |
offices |
640x480 color640x480 depth |
offices-3dlite.zipoffices-initial.plyoffices-rgbd.zip (3.6GB)offices.sens (5.1GB) |
 |