PiGraphs: Learning Interaction Snapshots from Observations
Stanford University
 SIGGRAPH 2016 Technical Papers
SIGGRAPH 2016 Technical Papers
Abstract
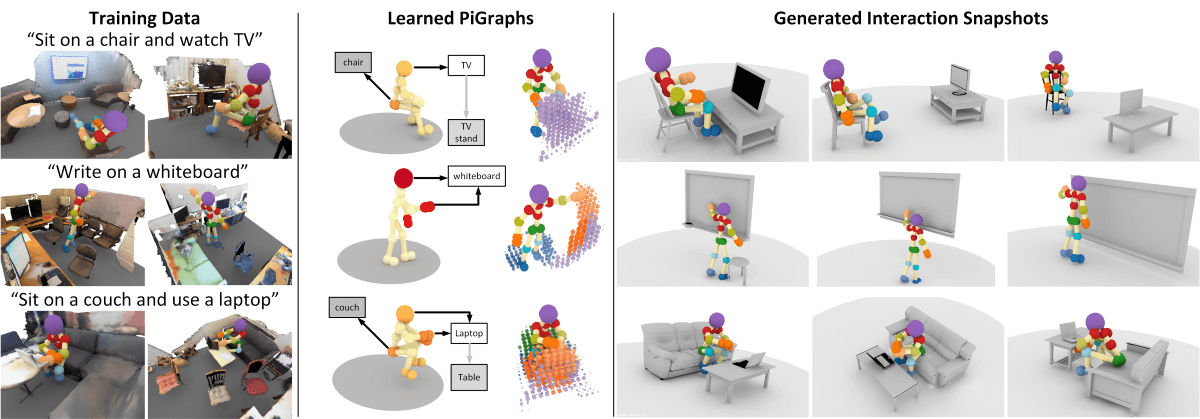
We learn a probabilistic model connecting human poses and arrangements of object geometry from real-world observations of interactions collected with commodity RGB-D sensors. This model is encoded as a set of prototypical interaction graphs (PiGraphs), a human-centric representation capturing physical contact and visual attention linkages between 3D geometry and human body parts. We use this encoding of the joint probability distribution over pose and geometry during everyday interactions to generate interaction snapshots, which are static depictions of human poses and relevant objects during human-object interactions. We demonstrate that our model enables a novel human-centric understanding of 3D content and allows for jointly generating 3D scenes and interaction poses given terse high-level specifications, natural language, or reconstructed real-world scene constraints.