Click slide for next, or goto previous, first, last slides or back to thumbnail layout.
Click slide for next, or goto previous, or back to thumbnail layout.
Click slide for next, or goto previous, first, last slides or back to thumbnail layout.
Click slide for next, or goto previous, or back to thumbnail layout.
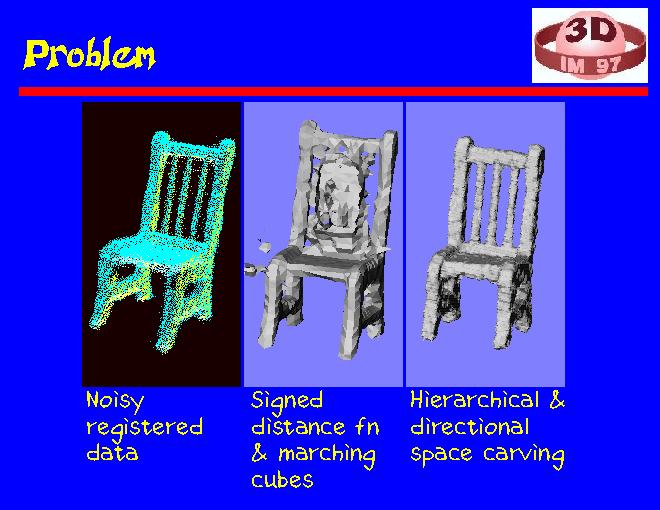
Here we have the result of applying Hoppe's step 3 method to the noisy points shown on the left. The method estimates a function that returns a distance to the surface from a given point in space so that the distance is positive if the point is outside the object and negative otherwise. The surface estimate is then the zero set of that function. In this data set the low quality of the data confused the signed distance function estimator. However, if our data comes in the form of range maps that include lot of implicit information about the connectivity of the data points and about the free space between the object and the scanner, we can get much better results, as shown in the image on the right.