 IEEE International Conference on Computer Vision (ICCV 2017)
IEEE International Conference on Computer Vision (ICCV 2017)
Abstract
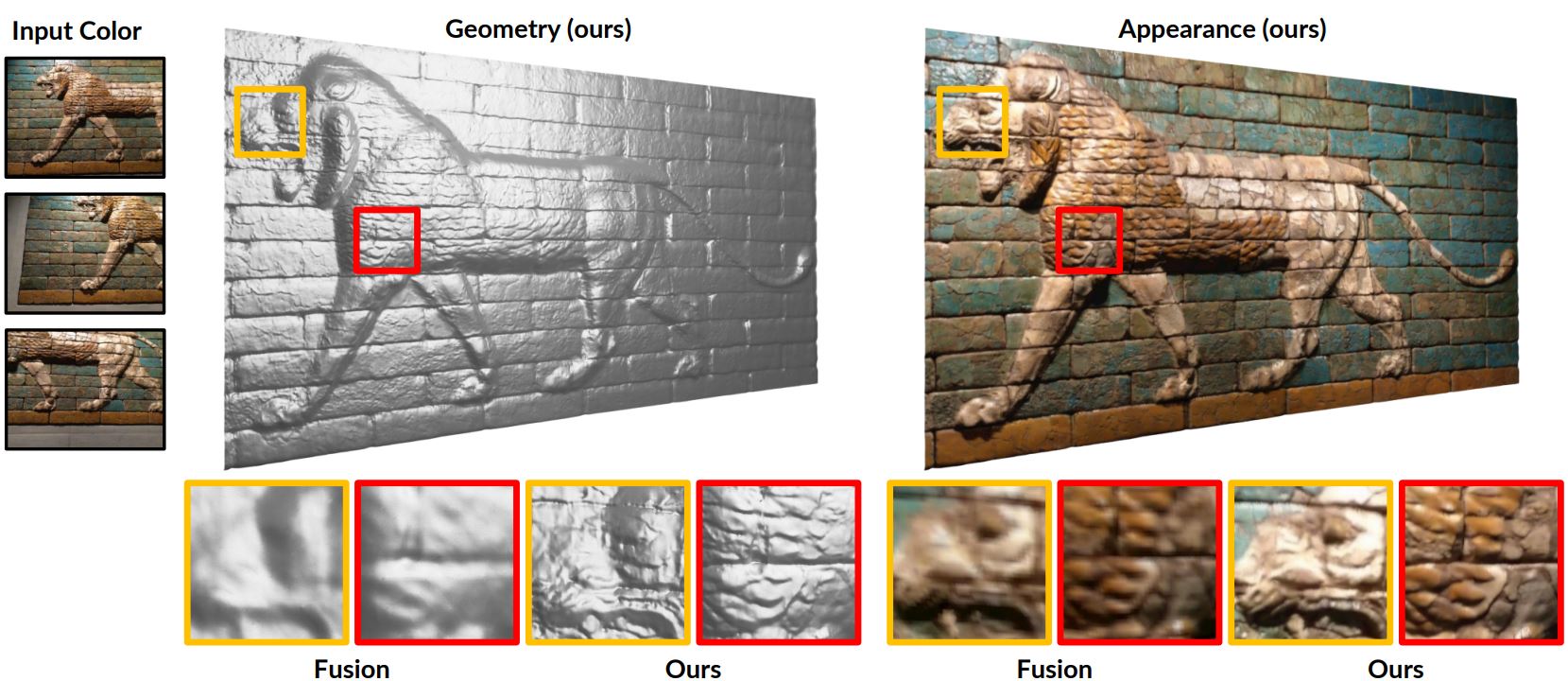
We introduce a novel method to obtain high-quality 3D reconstructions from consumer RGB-D sensors. Our core idea is to simultaneously optimize for geometry encoded in a signed distance field (SDF), textures from automaticallyselected keyframes, and their camera poses along with material and scene lighting. To this end, we propose a joint surface reconstruction approach that is based on Shapefrom-Shading (SfS) techniques and utilizes the estimation of spatially-varying spherical harmonics (SVSH) from subvolumes of the reconstructed scene. Through extensive examples and evaluations, we demonstrate that our method dramatically increases the level of detail in the reconstructed scene geometry and contributes highly to consistent surface texture recovery.