Nonconvex Rigid Bodies with Stacking
Stanford University
Stanford University
Stanford University
SIGGRAPH 2003
We consider the simulation of nonconvex rigid bodies focusing on interactions
such as collision, contact, friction (kinetic, static, rolling and spinning)
and stacking. We advocate representing the geometry with both a triangulated
surface and a signed distance function defined on a grid, and this dual
representation is shown to have many advantages. We propose a novel approach
to time integration merging it with the collision and contact processing
algorithms in a fashion that obviates the need for ad hoc threshold velocities,
and show that this approach matches the theoretical solution for blocks
sliding and stopping on inclined planes with friction. We also present
a new shock propagation algorithm that allows for efficient use of the
propagation (as opposed to the simultaneous) method for treating contact.
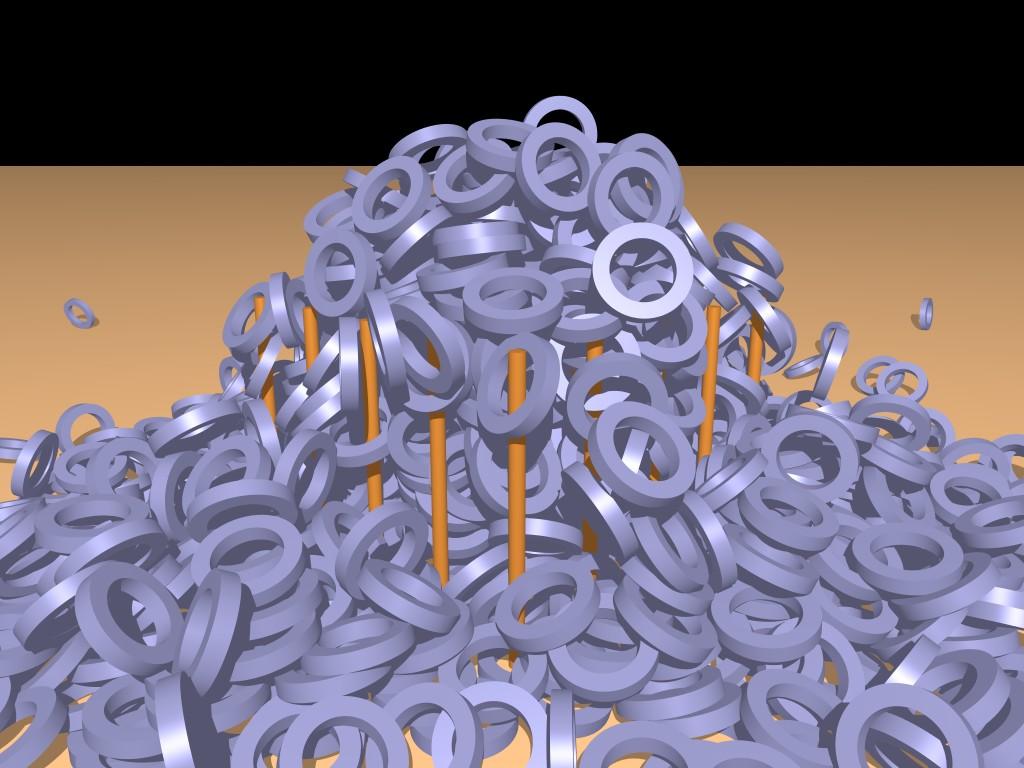
These new techniques are demonstrated on a variety of problems ranging
from simple test cases to stacking problems with as many as 1000 nonconvex
rigid bodies with friction as shown in figure 1.
Videos (DivX) [click here for more videos]