
Robert Bridson
Ron Fedkiw
Eran Guendelman
Sergey Koltakov
Neil Molino
Igor Neverov
Joey Teran
Overview
In the virtual human project we are interested in
developing a dynamic deformable model of
a human being that is capable of recreating complex biomechanically realistic
motions. The final model will
impact research areas from medicine to entertainment.
A virtual human could be used as a test subject in designing medical
devices when human testing is dangerous, for example
to test the functionality of an exoskeleton that would help paraplegics
and quadriplegics to walk.
This realistic virtual
model will require simulation of a number of diverse materials including bones,
muscles, fat, organs, skin, hair, eyes, etc. as well as other peripheral
materials such as clothing and an environment (air, water, smoke, fire, etc.).
Algorithms are needed to model both the
dynamics of human motion and the interactions of the various components with
each other and their environments, for example collision detection and response
or solid/fluid interaction.
The
modeling process consists of a number of coupled layers.
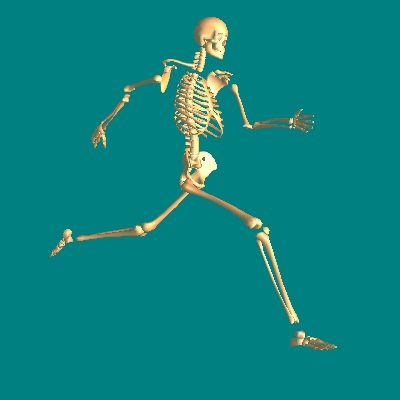
At the lowest level, the model is simply a skeleton of articulated rigid
bones. However, though seemingly
simple, simulation of articulated rigid body dynamics is a complex area of open
research. Issues like collision
detection and resolution as well as enforcement of complex constraints in six
dimensional joint spaces between rigid bodies complicate the simulation
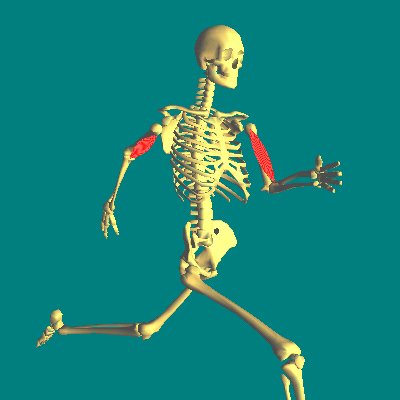
environment considerably. The next layer of the model is muscle. Our muscle models are volumetric and are capable of deforming
dynamically. The dynamics are
simulated using the finite element method and are at the state of the art in
biomechanical muscle simulation. The
active force generating properties are based on tension producing fibers as in
nature and the passive muscle properties are generated from an anisotropic
constitutive model with a nonlinear stress/strain relation (i.e. material
nonlinearity). At the next layer of
the model are fat and skin which envelop the musculoskeletal system.
Fat is also modeled using the finite element method but with a simple
linear viscoelastic constitutive model. Skin
is a two dimensional manifold which we model using mass/spring networks as we
have done with cloth. The last
layer of the model involves modeling hair as well as rendering.
Collision detection is a very difficult problem for thin materials like
hair and merits the development of new algorithms. Also, because of our familiarity with human outward
appearance, rendering a realistic human requires state of the art rendering
techniques like sub-surface scattering.
Rigid bodies
Articulated rigid bodies &
joint constraints
Muscle modeling
Meshing
Collision detection & modeling
