Example-based Synthesis of 3D Object Arrangements
 ACM Transactions on Graphics (Proc. SIGGRAPH Asia 2012)
ACM Transactions on Graphics (Proc. SIGGRAPH Asia 2012)
Abstract
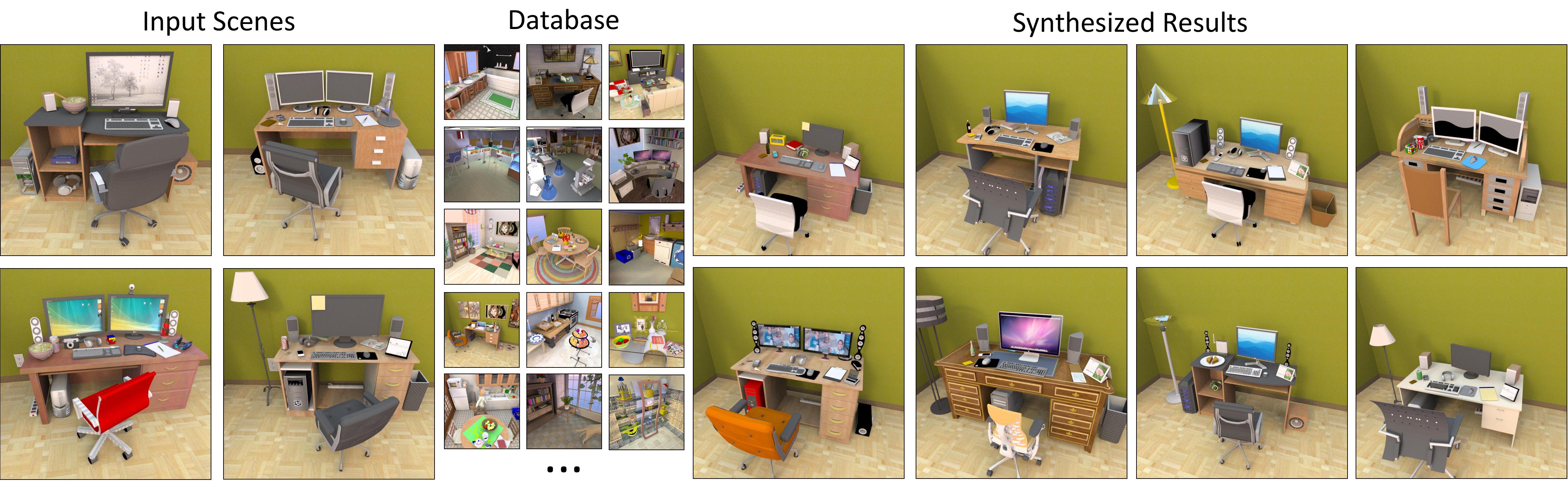
We present a method for synthesizing 3D object arrangements from examples. Given a few user-provided examples, our system can synthesize a diverse set of plausible new scenes by learning from a larger scene database. We rely on three novel contributions. First, we introduce a probabilistic model for scenes based on Bayesian networks and Gaussian mixtures that can be trained from a small number of input examples. Second, we develop a clustering algorithm that groups objects occurring in a database of scenes according to their local scene neighborhoods. These contextual categories allow the synthesis process to treat a wider variety of objects as interchangeable. Third, we train our probabilistic model on a mix of user-provided examples and relevant scenes retrieved from the database. This mixed model learning process can be controlled to introduce additional variety into the synthesized scenes. We evaluate our algorithm through qualitative results and a perceptual study in which participants judged synthesized scenes to be highly plausible, as compared to hand-created scenes.
Extras
Paper: ![]() PDF
PDF
Slides: ![]() PPTX
PPTX
FastForward Video: ![]() MP4
MP4
Supplemental Materials: ![]() ZIP
ZIP
Scene Database: ![]() ZIP
ZIP
Database Example Code: ![]() CODE
CODE
author = {Matthew Fisher and Daniel Ritchie and Manolis Savva and Thomas Funkhouser and Pat Hanrahan},
title = {Example-based Synthesis of 3D Object Arrangements},
booktitle = {ACM SIGGRAPH Asia 2012 papers},
series = {SIGGRAPH Asia '12},
year = {2012}}