Next: Rendering
Up: Calibration
Previous: Calibration
Using Homographies
Finding the projection matrix between the lenslet display and the image
display would certainly solve the calibration problem. However, a neat
insight is that instead of solving for the projection matrix, one can find
a homography such that when applied to an image, its projected image in
the lenslet array is aligned correctly [And]. Figure
3 illustrates this idea.
Figure 3:
The goal is to find homography h.
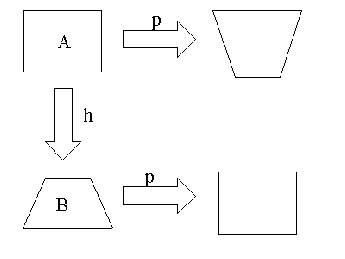 |
Given an image A, its image in the
display via projection matrix p is A'. We want to find a homography h such
that B' = Ahp is a correctly calibrated image.
Given a point  , projection matrix M and the projected point
, projection matrix M and the projected point  in
homogeneous coordinates:
in
homogeneous coordinates:
Let  be the
be the  'th row of M. Then
'th row of M. Then
 |
(1) |
 |
(2) |
 |
(3) |
The scale factor  is unknown. However, we can take the ratios of
Equations 1 and 2. Similarly for Equations 1 and
3 then we have:
is unknown. However, we can take the ratios of
Equations 1 and 2. Similarly for Equations 1 and
3 then we have:
 |
(4) |
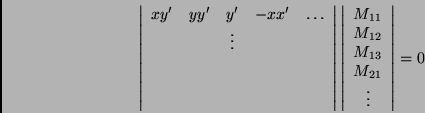
For each point there are such two equations. With 9 unknowns, we need
4 points (each with 2 equations) to create a matrix A of rank 8. The
matrix A is composed of only point coordinates, and the vector m comprises
the values of the matrix M.
The first row of A is shown with respect to equation 4. Since A is
rank deficient, its null space exists and in this case is of dimension 1
(the constant scale factor). Vector m can be recovered using SVD
techniques as the column of V corresponding to the zero singular value of
A [TV98] [HZ00]. In practice, correspondence between
points through a homography is known up to a noise factor, so many more
points are used, forming an overconstrained system and the column of V
corresponding to the smallest singular value of A is used. However, in
this case of calibrating the autostereoscopic display, corresponding point
are exactly known as explained in section 3.
Next: Rendering
Up: Calibration
Previous: Calibration
Billy Chen
2002-06-10