A frame is the data returned by the sensor as a result of a FCam::Shot. More...
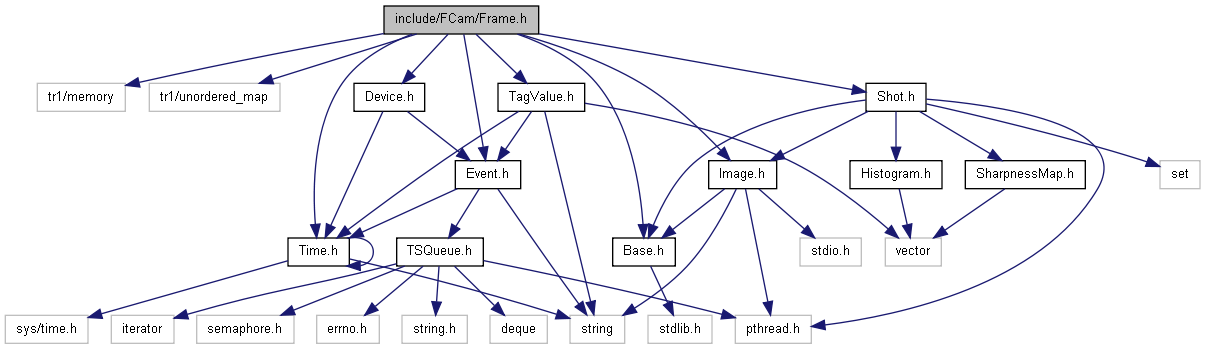
#include <tr1/memory>#include <tr1/unordered_map>#include "Base.h"#include "Device.h"#include "Time.h"#include "Image.h"#include "TagValue.h"#include "Shot.h"#include "Event.h"
Include dependency graph for Frame.h:
Go to the source code of this file.
Classes | |
| struct | FCam::_Frame |
| A struct containing the data that makes up a Frame. More... | |
| class | FCam::Frame |
| Data returned by the sensor as a result of a shot. More... | |
Namespaces | |
| namespace | FCam |
Main namespace for the API. | |
Defines | |
| #define | FCAM_FRAME_DEBUG(i) (i).debug(#i) |
| A debug helper macro that outputs the variable name of the image object at the macro call site along with the image debug information. | |
Typedefs | |
|
typedef std::tr1::unordered_map < std::string, TagValue > | FCam::TagMap |
| A TagMap is a dictionary mapping strings to TagValues. | |
Detailed Description
A frame is the data returned by the sensor as a result of a FCam::Shot.
Definition in file Frame.h.
