FCam::F2::Frame Class Reference
F2::Frame is a captured image with the additional parameters available on the F2 Frankencamera It is returned by F2::Sensor's getFrame. More...
#include <Frame.h>
Inheritance diagram for FCam::F2::Frame:
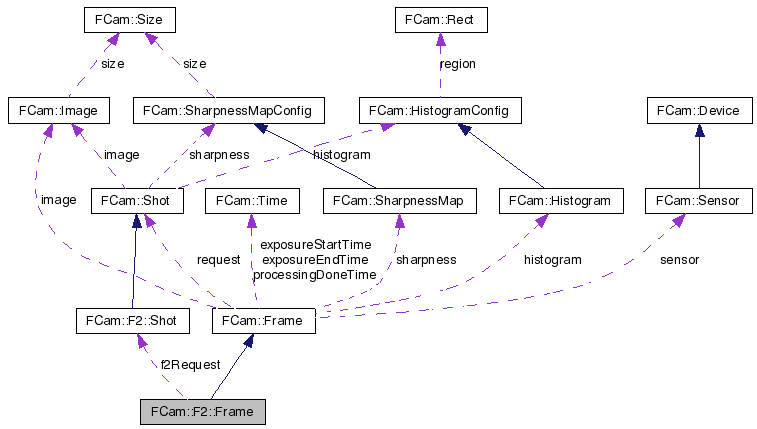
Collaboration diagram for FCam::F2::Frame:
Public Types | |
| typedef std::tr1::shared_ptr < Frame > | Ptr |
| A reference counted pointer to a frame. | |
Public Member Functions | |
| const Shot & | shot () const |
| Overriden shot getter returning a F2::Shot instead of a FCam::Shot. | |
Public Attributes | |
| RowSkip::e | rowSkip |
| Number of pixel rows skipped per row read out If rowSkip is smaller than rowBin, it will increased to match. | |
| ColSkip::e | colSkip |
| Number of pixel columns skipped per column read out If colSkip is smaller than colBin, it will increased to match. | |
| RowBin::e | rowBin |
| Number of pixel rows averaged together per row read out If rowSkip is smaller than rowBin, it will increased to match. | |
| ColBin::e | colBin |
| Number of pixel columns average together per column read out If colSkip is smaller than colBin, it will increased to match. | |
| int | roiStartX |
| If roiCentered is false, defines the top-left corner of the region read out 0 is the left edge of the active area. | |
| int | roiStartY |
| If roiCentered is false, defines the top-left corner of the region read out 0 is the top edge of the active area. | |
Protected Attributes | |
| Shot * | f2Request |
| An F2::Shot with the additional available fields. | |
Detailed Description
F2::Frame is a captured image with the additional parameters available on the F2 Frankencamera It is returned by F2::Sensor's getFrame.Definition at line 20 of file Frame.h.
Member Typedef Documentation
| typedef std::tr1::shared_ptr<Frame> FCam::F2::Frame::Ptr |
A reference counted pointer to a frame.
Use it instead of a regular pointer. This way you won't have to worry about deleting frames. For example:
Frame::Ptr f = sensor.getFrame();
Reimplemented from FCam::Frame.
Member Data Documentation
The documentation for this class was generated from the following file:
- F2/Frame.h