FCam::Frame Class Reference
Data returned by the sensor as a result of a shot. More...
#include <Frame.h>
Public Types | |
| typedef std::tr1::shared_ptr < Frame > | Ptr |
| A reference counted pointer to a frame. | |
Public Member Functions | |
| const Shot & | shot () const |
| A const reference to the shot that generated this frame. | |
| template<typename T> | |
| const T::Tags * | tags (T *device) const |
| Get the tags a specified device has placed on this frame. | |
Public Attributes | |
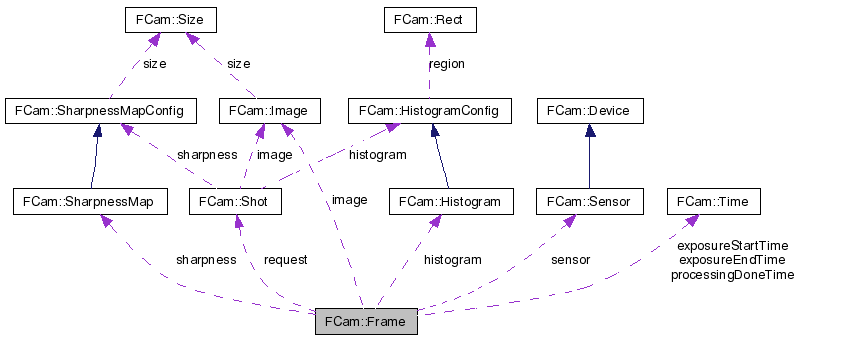
| Image | image |
| The actual image data. | |
| Time | exposureStartTime |
| The time the earliest pixel in the image started exposing. | |
| Time | exposureEndTime |
| The time the latest pixel in the rolling shutter finished exposing. | |
| Time | processingDoneTime |
| The time the image appeared out of the imaging pipe. | |
| Sensor * | sensor |
| The sensor that produced this frame. | |
| int | exposure |
| The actual exposure time for this frame in microseconds. | |
| int | frameTime |
| The actual number of microseconds between the start of this frame and the start of the next one. | |
| float | gain |
| The actual gain used to produce this frame. | |
| Histogram | histogram |
| A histogram produced by the imaging pipe. | |
| SharpnessMap | sharpness |
| A sharpness map produced by the imaging pipe. | |
Detailed Description
Data returned by the sensor as a result of a shot.May contain image data, a histogram, sharpness map, and assorted tags placed there by devices attached to the sensor from whence this frame came. It may also contain none of these, so check each component is valid before using it. Frames are passed around using reference counted pointers to them: Frame::Ptr
Definition at line 29 of file Frame.h.
Member Typedef Documentation
| typedef std::tr1::shared_ptr<Frame> FCam::Frame::Ptr |
A reference counted pointer to a frame.
Use it instead of a regular pointer. This way you won't have to worry about deleting frames. For example:
Frame::Ptr f = sensor.getFrame();
Reimplemented in FCam::F2::Frame.
Member Function Documentation
| const Shot& FCam::Frame::shot | ( | ) | const [inline] |
A const reference to the shot that generated this frame.
If you have a fancy sensor that takes more parameters, and a corresponding fancy shot that inherits from the base shot, this method should be overridden to return a const reference to your derived shot type instead. It is not a virtual method, so if your fancy frame is cast to a base frame, this method will return a base shot.
Reimplemented in FCam::F2::Frame.
| const T::Tags* FCam::Frame::tags | ( | T * | device | ) | const [inline] |
Member Data Documentation
The actual exposure time for this frame in microseconds.
Note that exposureEndTime - exposureStartTime may be more than this for rolling shutter sensors.
The actual number of microseconds between the start of this frame and the start of the next one.
Note that exposureEndTime - exposureStartTime may be more than this for rolling shutter sensors. The frame time will be at least the exposure time, typically plus a small overhead of several hundred microseconds.
| float FCam::Frame::gain |
The documentation for this class was generated from the following files: